
РПМ-ТМ2.16

Регулятор потужності РПМ-ТМ2.16 призначений для прецизійного автоматичного регулювання ефективної (діючої) потужності в електропечах за програмою з 15 лінійних ділянок.
РПМ-ТМ2.16 являє собою ПІД-контролер з послідовно-паралельною структурою і незалежними параметрами ПІД-регулювання:
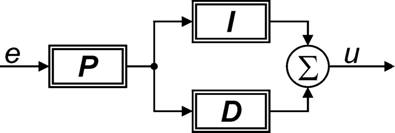
e – помилка управління;
P, I, D – відповідно пропорційна, інтегральна та диференційна складові ПІД-закону регулювання;
∑ – суматор;
u – управління (вихідний сигнал)
З метою прецизійного вимірювання потужності нагрівача розроблено оригінальний перетворювач активної потужності, функціональна схема одного з двох каналів якого показана на малюнку нижче.

Активна потужність P=UI, де U та I – діючі (ефективні) значення напруги та струму, отримані з каналів датчика активної потужності. Кожен із каналів реалізує стандартну процедуру перетворення для струму, що діє, або напруги.
Вимірюваний сигнал перемножується і надходить на вхід перетворювача напруги в частоту, вихід якого надходить на вхід суматора, який виступає в ролі інтегратора. Після вилучення квадратного кореня в блоці БІКК та фільтрації у блоці ФНЧ дані готові до використання.
Стабілізація ефективної електричної потужності нагрівача дозволила позбутися негативного впливу нестабільності та спотворення форми живильної мережі, домогтися підтримки температури в межах ±0,2С (вимірювання проводилися оптичним пірометром при 2000С і вольфрам-реневою термопарою при 1600С при потужності на нагрівачі. Застосування регуляторів з описаним перетворювачем потужності дозволило значно знизити вплив зношування нагрівача (зміна його поперечної площі, т.зв. «вигоряння») на температурний режим установки.
Перелік функцій, які виконує регулятор:
- формування П, ПІ, ПД та ПІД-законів регулювання;
- формування програмного завдання потужності у вигляді лінійної функції часу:
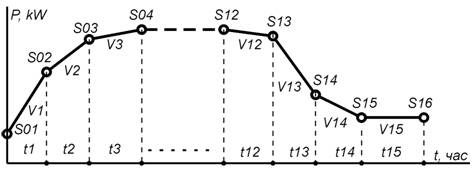
Програма складається з 15 лінійних ділянок. Кожна ділянка визначається значенням потужності початку S(n) і кінця S(n+1) ділянки і тривалістю ділянки t(n).
Швидкість зміни потужності V(n) обчислюється автоматично. Будь-яку з ділянок можна пропустити або змінити його параметри без зупинки програми. Нульові значення заданої потужності чи тривалості викликають зупинення програми.
- ручне керування вихідним сигналом регулятора;
- безпечне перемикання управління з ручного режиму на автоматичний режим;
- діагностика помилок по цифровому дисплею;
- цифрова індикація режимів та параметрів налаштування регулятора;
- формування на виході сигналів для фазоімпульсного керування силовими тиристорами.
Регулятор також забезпечує:
- запис заданих та поточних параметрів в енергонезалежну електронну пам’ять;
- Контроль живлення нагрівача з плавним відновленням регулювання;
- Контроль синхронної роботи силових тиристорів.
Основні технічні дані та характеристики
| 1 | Електроживлення регулятора: | |
| - Напруга, В | 220+10%-15% | |
| - Частота, Гц | 50±1;60±1 | |
| 2 | Потужність, ВА, не більше | 20 |
| 3 | Діапазон зміни завдання, кВт | 0,1 |
| 4 | Дискретність встановлення завдання, кВт | 0,01 |
| 5 | Роздільна здатність, Вт | 2 |
| 6 | Закони регулювання | П, ПД, ПІ, ПІД |
| 7 | Коефіцієнт пропорційності Kp | 0÷99,9 |
| 8 | Постійна часу інтегрування Ti, с | 0÷9999 |
| 9 | Коефіцієнт диференціювання Тd, с | 0÷999,9 |
| 10 | Індикація на дисплеї: | |
| а) у режимі "АВТ" |
| |
| б) у режимі "РУЧ" |
| |
| 11 | Число ділянок програми | 15 |
| 12 | Макс. тривалість ділянки, год | 100 |
| 13 | Цикл регулювання, с | 0,1÷80 |
| 14 | Кількість каналів виміру | 2 |
| 15 | Максимальні амплітудні значення вхідних сигналів: | |
|
| |
| 16 | Максимальна роздільна здатність каналів індикації: | |
|
| |
| Конфігурація: | ||
|---|---|---|
| 17 | Центральний процесор | ATmega128 |
| 18 | Частота оновлення показань на дисплеї, с | 1,0 |
| 19 | Інтерфейс | RS-485 |
| 20 | Протокол* | Modbus-RTU |
| 21 | Вихідні сигнали | ФІ (300мА, 10В) |
| 22 | Маса: | |
|
| |
| 23 | Габаритні розміри: | |
|
| |
Блок-схема підключення регулятора до нагрівача

Під час роботи регулятор здійснює контроль синхронної роботи силового тиристорного блоку VS, що забезпечує коректну роботу регулятора під час управління індуктивним навантаженням (силовим трансформатором).
При короткочасних перебоях електроживлення регулятор відновлює всі поточні параметри програми (номер поточної ділянки, потужність та швидкість її зміни) з мінімальними втратами процесу регулювання. Регулятор плавно відновить останнє перед збоєм електроживлення значення виходу, після чого увімкнеться штатне регулювання потужності. Значення поточної потужності, що задається, автоматично буде присвоєно значення, виміряне в момент збою електроживлення.