
РТ2К-16

Прецизійний двоконтурний програмований регулятор температури РТ2К-16 призначений для автоматичного прецизійного регулювання температури в об’єктах різного класу за програмою з 16 лінійних ділянок.
Регулятор є мікропроцесорним каскадним ПІД-контролером з регулюванням температури головним (Main) контуром і стабілізацією ефективної потужності підлеглим (Slave) контуром:
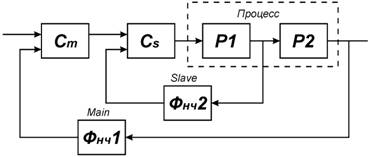
- Cm – головний (Main) паралельний ПІД-контролер;
- Cs – підлеглий (Slave) паралельний ПІД-контролер;
- P1 та P2 – контрольовані параметри об’єкта управління (ефективна потужність та температура нагрівача відповідно);
- Фнч1 та Фнч2 - однополюсні рекурсивні фільтри низької частоти вимірюваного сигналу для головного та підлеглого контурів керування відповідно.
Кожен контур являє собою ПІД-контролер з паралельною структурою і незалежними параметрами ПІД-регулювання:
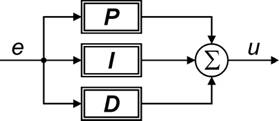
e – помилка управління; P, I, D – відповідно пропорційна, інтегральна та диференційна складові ПІД-закону регулювання; ∑ – суматор; u – вихідний сигнал.
Будь-який контур регулятора можна вимкнути через відповідний пункт у меню. При відключенні будь-якого контуру каскадний контролер стає номінальним паралельним ПІД-регулятором.
Перелік функцій, які виконує регулятор:
- формування П, ПІ, ПД і ПІД - законів регулювання в обох контурах управління;
- формування програмного завдання температури у вигляді лінійної функції часу;
- ручне керування вихідним сигналом регулятора;
- безпечне перемикання управління з ручного режиму в автоматичний режим;
- діагностика помилок за цифровим дисплеєм;
- цифрова індикація режимів та параметрів налаштування регулятора;
- формування на виході сигналів для фазоімпульсного керування силовими тиристорами.
Регулятор також забезпечує:
- запис заданих та поточних параметрів в енергонезалежну електронну пам’ять;
- цифрову компенсацію температури холодних спаїв;
- контроль термоперетворювача, видачу аварійного сигналу у разі його обриву з автоматичним переходом регулятора в режим стеження;
- контроль живлення навантаження з плавним відновленням регулювання;
- контроль синхронної роботи силових тиристорів.
Технічні дані регулятора температури:
| 1 | Електроживлення регулятора: | |
| Напруга, В | 220+10%-15% | |
| Частота, Гц | 50±1;60±1 | |
| 2 | Потужність, ВА, не більше | 20 |
| Головний контур управління: | ||
|---|---|---|
| 3 | Тип датчика температури | термоелектричний перетворювач ТВР 5/20* |
| 4 | Діапазон зміни завдання, °C | 0÷1800 |
| 5 | Дискретність встановлення завдання, °C | 1,0 |
| 6 | Роздільна здатність, °C | 0,1 |
| 7 | Закони регулювання | П, ПД, ПІ, ПІД |
| 8 | Коефіцієнт пропорційності Kp | 0÷3000 |
| 9 | Постійна часу інтегрування Ti, х10с | 0÷9999 |
| 10 | Коефіцієнт диференціювання Kd | 0÷1000 |
| 11 | Індикація на дисплеї: | |
| а) у режимі "А" |
| |
| б) у режимі "M" |
| |
| 12 | Число ділянок програми | 15 |
| 13 | Макс. тривалість ділянки, година | 1000 |
| 14 | Цикл регулювання, мс | 20÷9999 |
| Підлеглий контур управління: | ||
| 15 | Кількість каналів виміру | 2 |
| 16 | Діючі значення вхідних сигналів блоку вимірювача: | |
|
| |
| 17 | Максимальна амплітуда вхідного сигналу блоку узгодження, В | 312 |
| 18 | Максимальна роздільна здатність каналів індикації: | |
|
| |
| 19 | Діапазон зміни завдання, Вт | 0÷10000 |
| 20 | Закони регулювання | П, ПД, ПІ, ПІД |
| 21 | Коефіцієнт пропорційності Kp | 0÷3000 |
| 22 | Постійна часу інтегрування, х10с | 0÷9999 |
| 23 | Коефіцієнт диференціювання Kd | 0÷1000 |
| 24 | Індикація на дисплеї: | |
| а) у режимі "А" |
| |
| б) у режимі "M" |
| |
| 25 | Цикл вимірювання, мс | 80 |
| Структура: | ||
| 26 | Центральний процесор | ATmega128 |
| 27 | Частота оновлення показань на дисплеї, с | 1,0 |
| 28 | Інтерфейс | RS-485 |
| 29 | Протокол | Modbus-RTU |
| 30 | Вихідні сигнали | ФІ (20мА, 5В) |
* - будь-яка стандартна на замовлення.
Регулятор конструктивно виконаний у вигляді закритого металевого корпусу для щитового утопленого монтажу на вертикальній панелі.
Для узгодження рівнів вхідних та вихідних сигналів регулятора із зовнішніми джерелами сигналів та пристроєм аварійної сигналізації застосовується блок узгодження (БУз), що входить до комплекту регулятора, який забезпечує:
- гальванічну розв’язку входу та виходу регулятора;
- узгодження амплітуди вимірюваної напруги із вхідним сигналом регулятора;
- узгодження амплітуди синхронізуючої напруги та сигналу контролю роботи силових тиристорів з відповідними входами регулятора;
- посилення аварійного сигналу для підключення зовнішніх виконавчих пристроїв (світлової чи звукової індикації).
Блок зібраний у закритому корпусі з полістиролу та кріпиться всередині електрощита за допомогою гвинтів через отвори у кришці.
Програмне завдання регулятора формується у вигляді шматково-лінійної функції часу:
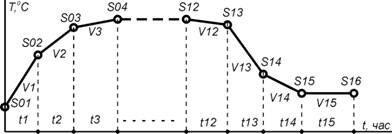
Програма складається з 15 лінійних ділянок. Кожна ділянка визначається температурами початку S(n) і кінця S(n+1) ділянки, тривалістю ділянки t(n) і швидкістю зміни температури V(n). Будь-яку з ділянок можна пропустити або змінити його параметри без зупинки програми. Нульові значення заданої температури та тривалості викликають зупинення програми.
Схема підключення регулятора РТ2К-16

Живлення нагрівача EK здійснюється напругою AC220V, яка через керований регулятором РТ2К-16 блок тиристорів VS надходить на первинну обмотку трансформатора TV, до вторинної обмотки якого підключений нагрівач EK.
Термопара BK, встановлена в безпосередній близькості від нагрівача EK, перетворює його температуру в напругу термо-едс U(t0), яка надходить на відповідний вхід регулятора. На інші два входи регулятора надходять сигнали U2 і I2 з вторинної обмотки силового трансформатора TV. Регулятор автоматично здійснює керування за ПІД-законом температурою нагрівача EK відповідно до заданої програми, одночасно здійснюючи стабілізацію ефективної електричної потужності нагрівача.
У випадку обриву термопари BK на виході регулятора Alm формується аварійний сигнал, що включає зовнішній пристрій сигналізації H, а вихід управління тиристорами Out утримується в стані, що відповідає останньому перед обривом термопари значенню термо-е.д.с.
Можливі три альтернативні конфігурації структури регулятора:
I – ПІД-регулятор електричної потужності;
II – двоконтурний ПІД-регулятор з програмним регулюванням температури об’єкта головним (Main) контуром та стабілізацією електричної ефективної потужності підлеглим (Slave) контуром;
III – програмований ПІД-регулятор температури об’єкта.
Кожна конфігурація має два режими – ручне управління виходом регулятора та автоматичне ПІД-керування.